2. Isaac Sim 快速上手
Isaac Sim 是 NVIDIA 基于 Omniverse 构建的机器人仿真应用。它的价值不只是“把机器人放进 3D 场景里跑起来”,而是把场景搭建、物理仿真、传感器模拟、资产管理、ROS 2 对接、数据生成和策略训练衔接到了同一套生态里。
如果你是第一次接触 Isaac Sim,这一节的目标很明确:
- 选对安装方式,把软件装起来。
- 认识 GUI 的核心区域,不被界面吓住。
- 在场景里完成一个最小实验。
- 用 Python 把同样的事情复现出来。
2.1 Isaac Sim 是什么
对具身智能和机器人开发来说,Isaac Sim 主要有四个价值:
- 能在接近真实物理和视觉条件的环境里验证算法,而不是一上来就上真机。
- 能直接模拟相机、深度、RTX LiDAR、IMU、接触等传感器。
- 能把
URDF、MJCF、USD等机器人资产放到同一条工作流里管理。 - 能继续往上接
ROS 2、Replicator、Isaac Lab,把仿真扩展到数据生成和训练。
从底层看,它主要建立在这些能力之上:
Omniverse Kit:应用框架和扩展系统USD:场景和资产描述格式PhysX:物理引擎RTX:渲染与传感器模拟
2.2 安装前先做两个判断
正式安装前,建议先判断两件事。
1. 你是想先体验 GUI,还是先把它接进 Python 项目
- 想先熟悉界面、看场景、点菜单:优先
Workstation二进制安装。 - 想直接脚本化、做项目集成:优先
pip安装。 - 想跑远程服务器或无头环境:再考虑
Docker。
2. 你的机器是不是在官方支持范围内
Isaac Sim 对 GPU、显存和 RT Cores 的要求,比很多人直觉里“能跑 3D 软件就行”更高。安装前先看官方要求,能少踩很多坑。
2.3 截至 2026-04-14,版本怎么选
这是当前最容易装错的一步。
截至
2026-04-14,NVIDIA 官方latest文档首页明确写着Isaac Sim 6.0仍然是Early Developer Release,文档也标注为不完整;对于第一次上手和稳定使用,仍更建议优先使用Isaac Sim 5.1.0。
这意味着:
- 新手优先装
Isaac Sim 5.1.0。 - 不要再按照旧文章把
Omniverse Launcher当成主安装路径。 Omniverse Launcher / Nucleus Workstation / Nucleus Cache已在2025-10-01起被官方标记为弃用。
2.4 系统要求
Isaac Sim 5.1 官方给出的 x86_64 最低要求如下:
| 项目 | 官方最低要求 | 更舒服的入门配置 |
|---|---|---|
| 操作系统 | Ubuntu 22.04/24.04 或 Windows 10/11 | Ubuntu 22.04/24.04 或 Windows 11 |
| CPU | Intel i7 7代 / Ryzen 5 | Intel i7 9代以上 / Ryzen 7 以上 |
| 内存 | 32 GB | 64 GB |
| 显卡 | GeForce RTX 4080 | RTX 4080/5080 或更高 |
| 显存 | 16 GB | 16 GB 到 48 GB |
| 存储 | 50 GB SSD | 500 GB SSD 以上 |
额外要注意:
- 没有 RT Cores 的 GPU,比如
A100、H100,官方明确写了不支持。 - 低于官方最低配置的小场景“也许能跑”,但不应该作为稳定开发基线。
- 如果你在 Windows 上新装系统,优先用
Windows 11。官方文档已经注明Windows 10在2025-10-14之后不再是未来版本的支持重点。
2.5 安装方式怎么选
对大多数第一次上手的人,我建议这样选:
- 想最快进入 GUI:
Workstation - 想把仿真集成进 Python 项目:
pip - 想最短路径先照着官方步骤跑通:先看官方的
Quick Install
如果你只是想尽快按官方最短路径装起来,可以先看:
方案 A:Workstation 二进制安装
这是最适合第一次上手的本地 GUI 方案。
Windows
mkdir C:\isaacsim
cd %USERPROFILE%\Downloads
tar -xvzf "isaac-sim-standalone-5.1.0-windows-x86_64.zip" -C C:\isaacsim
cd C:\isaacsim
post_install.bat
isaac-sim.bat
Ubuntu
mkdir ~/isaacsim
cd ~/Downloads
unzip "isaac-sim-standalone-5.1.0-linux-x86_64.zip" -d ~/isaacsim
cd ~/isaacsim
./post_install.sh
./isaac-sim.sh
第一次启动时别急,官方文档明确提到首轮会进行 shader cache 预热,可能需要 5-10 分钟。
如果你怀疑是环境问题,可以先跑兼容性检查:
- 二进制安装:
isaac-sim.compatibility_check.bat或./isaac-sim.compatibility_check.sh - pip 安装:
isaacsim isaacsim.exp.compatibility_check
方案 B:pip 安装
Isaac Sim 5.1 的 Python 包要求 Python 3.11。
Windows
python3.11 -m venv env_isaacsim
env_isaacsim\Scripts\activate
pip install --upgrade pip
set OMNI_KIT_ACCEPT_EULA=YES
pip install isaacsim[all,extscache]==5.1.0 --extra-index-url https://pypi.nvidia.com
isaacsim
Ubuntu
python3.11 -m venv env_isaacsim
source env_isaacsim/bin/activate
pip install --upgrade pip
export OMNI_KIT_ACCEPT_EULA=YES
pip install isaacsim[all,extscache]==5.1.0 --extra-index-url https://pypi.nvidia.com
isaacsim
几个实用提醒:
- Windows 上如果用 pip 安装,官方文档提示可能需要开启 long path 支持。
extscache很有用,可以减少首次运行时的扩展拉取等待。- 一个具体项目里尽量不要混用二进制安装和 pip 安装作为同一套主环境,否则缓存和配置冲突会很难排查。
2.6 第一次打开 Isaac Sim,你在看什么
第一次进 GUI,不要急着点菜单。先认识最核心的几个区域:
Viewport:中间的 3D 视口,大部分观察和交互都在这里完成。Stage:场景树,本质上是当前 USD 场景的层级结构。Properties:选中对象后,在这里改位置、旋转、缩放、材质和物理属性。Content Browser:浏览资产和示例。- 时间轴与播放区:控制
Play、Pause、Stop。
安装成功后,首次进入 GUI 时大致会看到类似下面的界面:
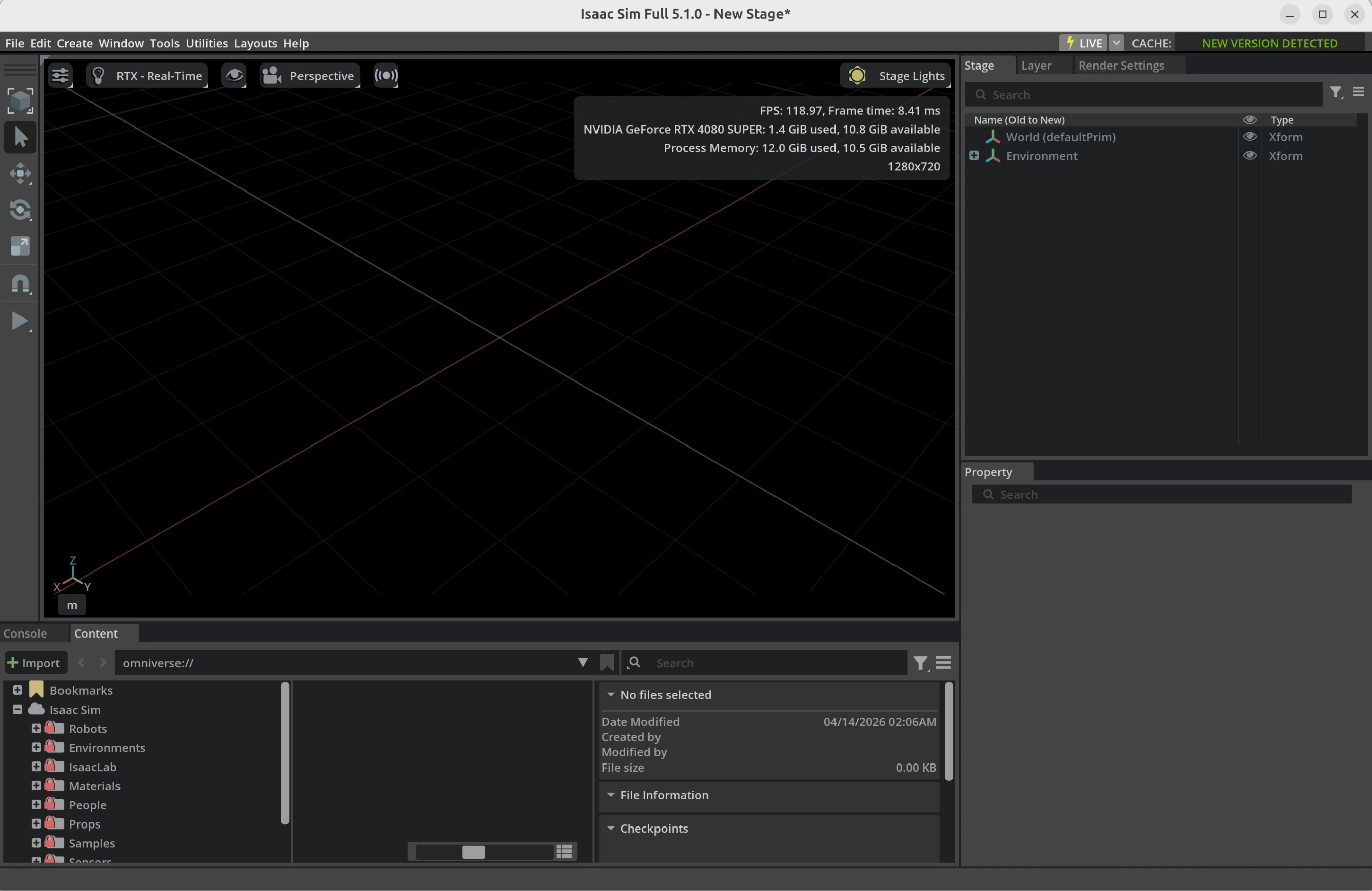
Isaac Sim 5.1 成功启动后的默认空场景界面。中间是 Viewport,右侧是 Stage 和 Property,底部是 Content Browser。
几个最常用的操作:
| 操作 | 快捷键 / 鼠标 |
|---|---|
| 移动对象 | W |
| 旋转对象 | E |
| 缩放对象 | R |
| 聚焦选中物体 | F |
| 旋转视角 | Alt + 左键拖动 |
| 平移视角 | Alt + 中键拖动 |
| 缩放视角 | Alt + 右键拖动 或滚轮 |
2.7 第一个场景:让一个立方体真正掉下来
这是最值得先做的实验,因为它会直接帮你建立两个关键概念:
- “看得见的物体”不等于“参与物理的物体”
- 碰撞体和刚体属性需要显式添加
按下面步骤来:
- 打开 Isaac Sim,新建空场景:
File > New - 添加地面:
Create > Physics > Ground Plane - 添加光源:
Create > Lights > Distant Light - 添加立方体:
Create > Shape > Cube - 点击
Play,你会发现它什么都不会发生 - 在
Stage里选中这个立方体 - 在
Properties里点击Add - 选择
Physics > Rigid Body with Colliders Preset - 再次点击
Play,它就会下落并与地面碰撞
这一步背后的直觉非常重要:
- 只有可视网格,没有物理属性,它只是“能看见”
- 只有碰撞,没有刚体,它更像“静态障碍物”
- 同时有刚体和碰撞,才是会掉落、会碰撞的动态物体
如果你想调试碰撞体,可以打开碰撞可视化:
- 视口里的眼睛图标
Show By Type > Physics > Colliders > All
2.8 第一个 Python 脚本
当你能在 GUI 里摆出一个最小场景之后,下一步就应该把这个过程写成脚本。这样你才能得到:
- 可复现的实验环境
- 可版本管理的仿真场景
- 更容易批量生成数据和任务
下面是一个最小可运行脚本。它会创建地面和一个蓝色立方体,然后让它在重力作用下掉下来。
from isaacsim import SimulationApp
simulation_app = SimulationApp({"headless": False})
import numpy as np
from isaacsim.core.api import World
from isaacsim.core.api.objects import DynamicCuboid
world = World(stage_units_in_meters=1.0)
world.scene.add_default_ground_plane()
cube = world.scene.add(
DynamicCuboid(
prim_path="/World/random_cube",
name="fancy_cube",
position=np.array([0.0, 0.0, 1.0]),
scale=np.array([0.5, 0.5, 0.5]),
color=np.array([0.1, 0.4, 1.0]),
)
)
world.reset()
for _ in range(300):
world.step(render=True)
simulation_app.close()
运行方式:
如果你是二进制安装
cd C:\isaacsim
python.bat path\to\hello_cube.py
cd ~/isaacsim
./python.sh path/to/hello_cube.py
如果你是 pip 安装
python hello_cube.py
你需要理解这几个核心对象:
SimulationApp:把 Isaac Sim 应用本体启动起来World:对场景、物理步进和对象管理的高层封装DynamicCuboid:一个带刚体属性的动态立方体world.reset():把刚加入场景的物理对象真正初始化好world.step(render=True):推进一次物理和渲染循环
如果你不想让窗口在 300 帧后自动退出,可以改成:
while simulation_app.is_running():
world.step(render=True)
立方体下落演示效果:
立方体从空中下落并与地面碰撞,对应上面的最小脚本运行结果。
2.9 从立方体到机器人
现在你已经能理解 Isaac Sim 的最小工作原理了,接下来就该把“几何体”换成“机器人”。
最简单的办法是先加载官方内置机器人:
- 新建场景
- 选择
Create > Robots > Franka Emika Panda Arm - 打开
Tools > Physics > Physics Inspector查看关节、限位和驱动参数 - 点击
Play,观察机器人在仿真时间轴中的状态
这一步真正要建立的认知是:
机器人资产 -> USD 场景中的 articulation -> 关节参数 -> 控制接口
如果你有自己的机器人模型,常见入口有两个:
File > Import > URDFFile > Import > MJCF
对机器人开发者来说,Isaac Sim 通常不是终点,而是中间站。真实工作流更像这样:
URDF / CAD / MJCF -> USD -> 调碰撞与关节 -> 加传感器 -> 接控制器 / ROS 2 -> 做任务验证
2.10 Isaac Sim 还能做什么
你可以把 Isaac Sim 看成一个“机器人实验底座”。在这个底座之上,常见的进阶方向主要有四类。
1. 机器人仿真与控制
- 机械臂抓取
- 移动机器人导航
- 多机器人协同
- 关节级控制、轨迹跟踪、运动规划
2. 传感器仿真
Isaac Sim 的优势之一就是传感器种类全,而且和 RTX 渲染深度绑定:
- RGB 相机
- 深度相机
- RTX LiDAR
- Radar
- IMU
- 接触传感器
3. 合成数据生成
如果你做感知、检测、分割,或者 VLM / VLA 前的数据管线,Isaac Sim 的价值会很大:
- 领域随机化
- 自动标注
- 多视角采集
- 大规模批量生成
这一部分主要会和 Replicator 联系起来。
4. 强化学习与具身训练
NVIDIA 官方文档明确把 Isaac Lab 放在 Isaac Sim 的上层工作流里。你可以把两者的关系理解为:
Isaac Sim:负责世界、机器人、传感器、物理和仿真步进Isaac Lab:负责把这些仿真能力组织成可训练的任务环境
如果你的目标是 locomotion、manipulation、模仿学习或 RL,通常不会只停在 Isaac Sim 本体,而是会继续进入 Isaac Lab。
2.11 新手最常踩的坑
坑 1:第一次启动很慢,以为程序卡死了
首轮启动预热 shader cache 很正常。第一次启动慢,不等于安装失败。
坑 2:物体能看到,但不会掉
这通常不是“重力坏了”,而是你只创建了可视对象,没有给它加 Rigid Body 和 Collider。
坑 3:装了很多套环境,最后不知道哪个在生效
同一台机器上可以同时有二进制版、pip 版、Docker 版,但一个具体项目最好只明确依赖其中一种主工作流。
坑 4:显卡能跑游戏,不代表一定适合 Isaac Sim
Isaac Sim 对显存和 RT Cores 的要求比很多“游戏引擎式直觉”更高。旧文章里常见的 RTX 3070 / 8GB 级别配置,在当前官方要求下已经不是推荐基线。
坑 5:网络没问题,但资产加载依然不完整
访问在线资产和某些扩展需要网络。如果你在公司网络、校园网或受限网络环境下使用,资产加载失败不一定是程序本身的问题。
2.12 一条实用的学习路径
如果你准备认真学 Isaac Sim,我建议按这个顺序走:
- 完成 GUI 基础:会新建场景、加地面、光源、立方体、刚体和碰撞体
- 完成一个最小 Python 脚本:会用
SimulationApp、World、DynamicCuboid - 加入一个内置机器人:比如
Franka Panda - 学会导入自己的机器人:先从
URDF开始 - 学会至少一种传感器:相机或 LiDAR
- 再决定你要走哪条分支
- 做机器人系统集成:继续学
ROS 2 Bridge - 做数据集和感知:继续学
Replicator - 做强化学习和具身训练:继续学
Isaac Lab
2.13 本节小结
这一节最重要的结论有四个:
- Isaac Sim 不是单一模拟器,而是一整套机器人仿真工作台
- 对新手来说,
Isaac Sim 5.1.0仍然是截至2026-04-14更稳妥的入门版本 - 旧教程里常见的
Launcher安装路径已经过时 - 真正有效的入门顺序是
GUI 最小场景 -> Python 最小脚本 -> 机器人 -> 传感器 -> 上层框架
当你能把“让一个立方体掉下来”同时用 GUI 和 Python 各做一遍时,就已经迈过 Isaac Sim 上手阶段最关键的一道坎了。